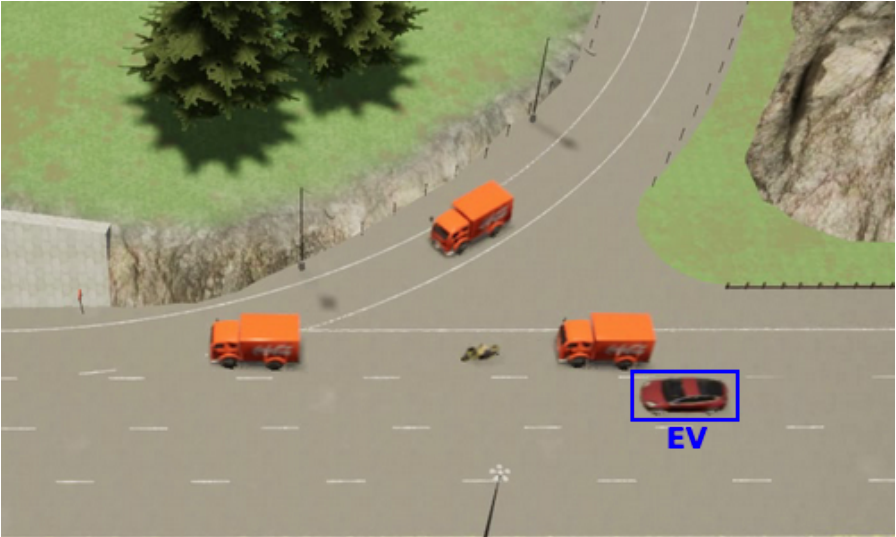
Hi there! I am currently a research intern at Google DeepMind and a PhD student in Machine Learning at the University of Bristol (UK). My research interests lie at the intersection of 3D Deep Learning, Neural Fields and 3D Gaussian Splatting, and Robotics Perception (Computer Vision, Tactile Sensing). I have a soft spot for Computer Graphics and Physically-Based Rendering. I am supervised by Prof Nathan Lepora and Dr Laurence Aitchison, and I am fortunate to collaborate with and get guidance from Alessio Tonioni (Google) and Jonathan Tremblay (NVIDIA). Previously, I worked as a Machine Learning research engineer in autonomous driving at the Netherlands Organisation for Applied Scientific Research (TNO), where I worked and led EU-funded projects on autonomous driving, and developed Deep Reinforcement Learning applications for self-driving vehicles.
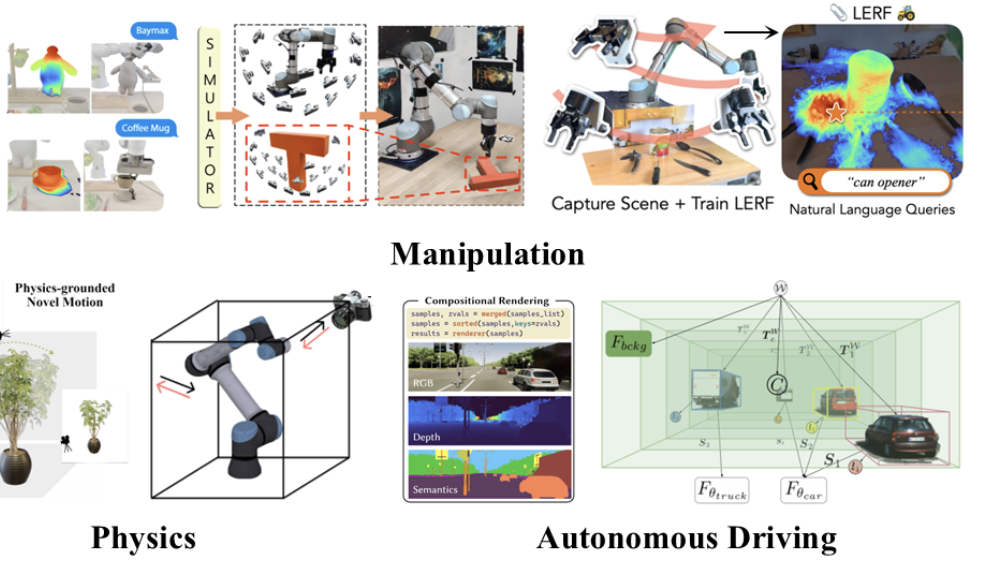
Neural Fields in Robotics: A Survey Muhammad Zubair Irshad, Mauro Comi, Yen-Chen Lin, Nick Heppert, Abhinav Valada, Rares Ambrus, Zsolt Kira, Jonathan Tremblay Currently in submission, available on Arxiv
I run an online 3D Deep Learning reading group, where we discuss papers in 3D Vision for the virtual and physical world. If you are interested or want to join, please visit the reading group website.
Teaching
Introduction to AI, Teaching Assistant, BSc unit, MSc unit, @University of Bristol, 2021/2022, 2021/2023
Anomaly Detection using Machine Learning, Guest Lecturer @Jheronimus Academy of Data Science, July 2021
Talks
A Hybrid-AI approach to Competence Assessment for Automated Driving Functions @SafeAI AAAI, February 2021
Updates
February 2025 ⭐ – I started my second research internship as a Student Researcher at Google DeepMind!
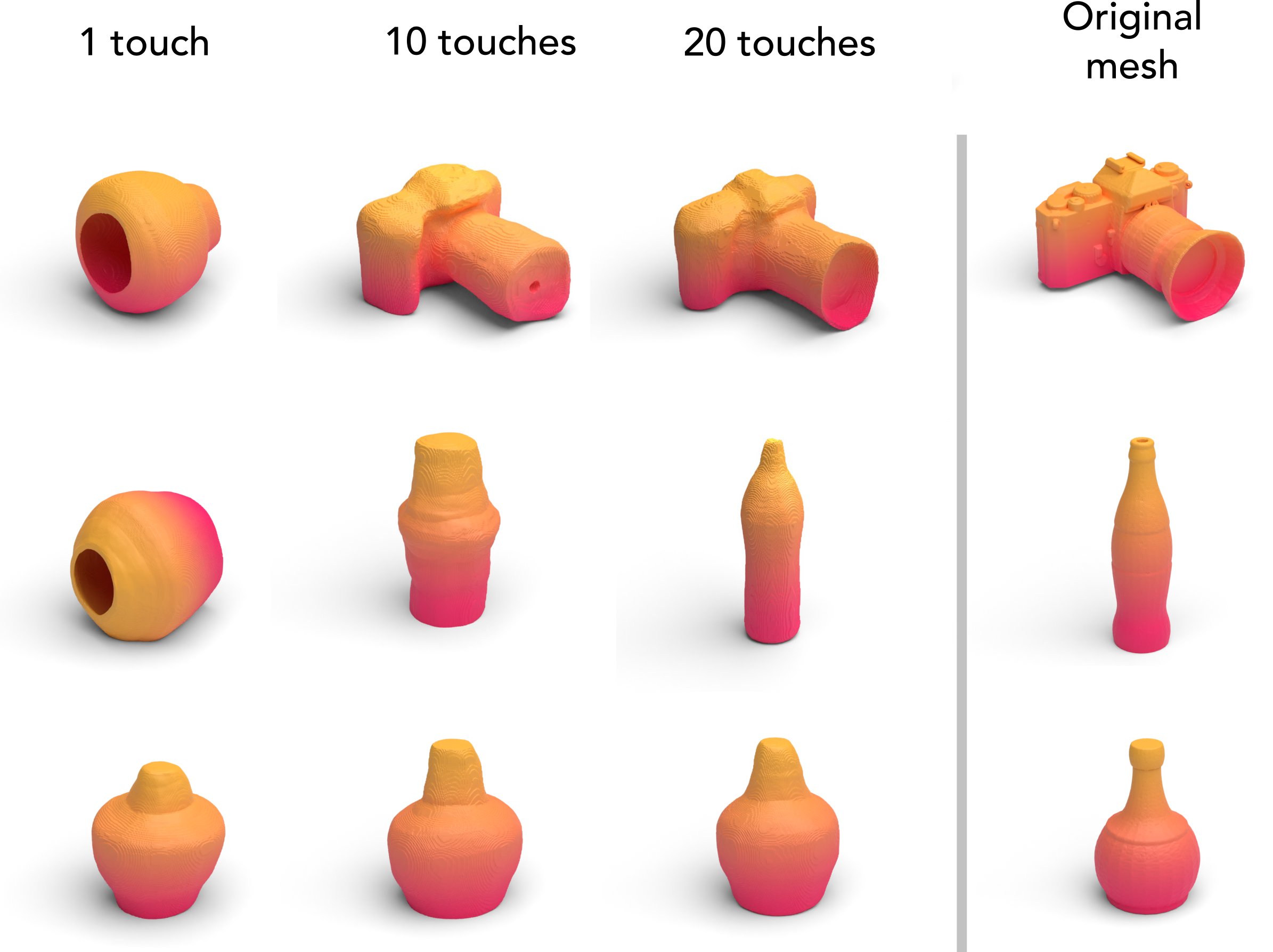
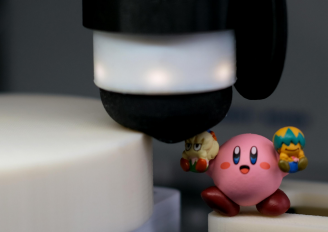
November 2024 – Our work Snap-it, Tap-it, Splat-it: Tactile-Informed 3D Gaussian Splatting for Reconstructing Challenging Surfaces (link) was accepted at 3DV 2025. See you in Singapore!
October 2024 – Our work Neural Fields in Robotics: A Survey was submitted to ArXiv (link).
September 2024 ⭐ – I started my research internship as a Student Researcher at Google DeepMind!
May 2024 - Our work TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction Using Vision-Based Tactile Sensing was accepted into the IEEE RA-L journal.
April 2024 - The 3D Deep Learning Reading Group I am running is starting again. Join us here.
October 2023 - Our work TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction Using Vision-Based Tactile Sensing was accepted to the Touch processing in AI workshop at NeurIPS 2024. See you in New Orleans!
May 2023 - Our work TouchSDF: A DeepSDF Approach for 3D Shape Reconstruction Using Vision-Based Tactile Sensing was accepted to the 3D Vision and Robotics workshop at CVPR 2023. See you in Vancouver!
April 2023 - Our work Implicit Neural Representation for 3D Shape Reconstruction Using Vision-Based Tactile Sensing was accepted to the workshop ViTac: Blending Virtual and Real Visuo-Tactile Perception at ICRA 2023. See you in London!
September 2021 - I started my PhD in Machine Learning at the University of Bristol.
February 2021 - Our work A Hybrid-AI approach to Competence Assessment for Automated Driving Functions was accepted at SafeAI AAAI 2021.
November 2019 - I graduated Cum Laude in Data Science with a MSc thesis on Deep RL for physically-based rendering.
April 2019 - I started to work as Machine Learning research engineer at the Netherlands Organisation for Applied Scientific Research (TNO).